Path Planning
1. 경로계획
- 정의 : 한 지점에서 다른 한 지점까지 가는 동안 일어날 수 있는 모든 상황을 고려하여 주행을 진행하는 기술입니다.
- 종류 : 전역 경로 계획 & 지역 경로 계획
- Global Path Planning
Global Map 안에서 출발 지점 ~ 도착 지점까지 갈 수 있는 수많은 경로 중에서 하나의 경로를 선택하는 기술입니다.
최소 비용, 최단 거리, 단순 정도 등에 따라 경로 선택
- Local Path Planning
Local Map 안에서 주변 정보를 실시간으로 처리합니다 => 사용자가 안전하고 효율적으로 주행할 수 있도록 하는 기술
전역 경로 계획과 스케일 차이가 있어 목적이 다르고 풀고자 하는 방법이 다릅니다.

- 돌발 상황에 대응하기 위한 여러 경로가 생성되며 Selection하는 알고리즘 필요
- Path 후보들을 설정하고, 후보들이 가지는 안정성, 효율성을 체크
- 실시간성이 높은 경로계획 알고리즘이 필요 (적은 계산량)
- Human-like 한 솔루션을 마련해야함
- 경로 계획에서 Perception이 제공하는 정보에 따라 주행의 퀄리티가 다름.
- Object Location , Direction, Velocity
- 간단한 수학 공식으로 충돌 회피를 위한 계산을 통해 안전한지를 체크할 여력이 있슴.
- 주행 환경 인식
- 주행 경로 탐색, 고정 지물 인식, 이동 물체 인식, 신호등 변동 물체 인식
- LIDAR, RADAR, Stereo Cam, GPS, HD-Map, V2X 통신
- 판단 주행 전략
- 목적지까지 경로 계획
- 차로 변경, 장애물 회피 등과 같은 돌발상황에 대한 판단
- 학습형 제어시스템, 판단/주행제어 시스템, 주행속도 및 경로 기록
- 차량 제어
- 핸들 조절, 가속, 감속, 급제동 등
- 경고 및 정보 제공
- ADAS, ITS
2. 경로 생성
- Local Planning을 중점으로 합니다.
정의 : 어떤 경로를 끊임없이 실시간으로 생성하여 선택하는 알고리즘
- Lane Keeping
- Vision으로 차선 인식 -> 차선 Set Point 도출 -> Polynomial interpolation 방식으로 차로 중심 Line 생성 -> Path Following
[주변에 차가 없는 경우]
- Lane 중점으로 쫓아가면 됨
- 주변의 다른 차량들이 차선을 잘 지킨다면 자신의 Lane만 인식
[주변 차량이 내 차선에 인접하거나 차폭이 넓은 차량이 주변에 주행하는 경우]
- 주변 차량의 위치를 고려해 실시간으로 미세한 주행경로 변경이 필요함
==> 이렇듯 항상 가운데가 아닌 새로운 경로 생성이 필요한 경우 많습니다.
[교차로를 지나는 경우]
- 신호만 고려하여 직진 여부만 생각하면 된다. -> decision making을 통한 경로 생성
- 주변 동적 물체 이동경로를 고려해서 경로 생성
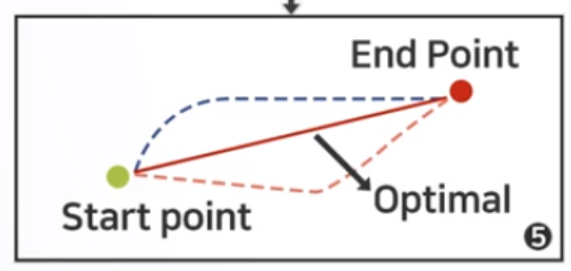
==>경로 생성이란 경로 후보를 만들고 그 중 최적의 안정성, 효율성을 극대화하는 최적의 path를 선택하는 것입니다.
Astar Algorithm
최단 경로를 찾아내는 그래프/트리 탐색 알고리즘입니다.
2D Grid로 현실을 표현해 Grid Map 상에서 최단경로 탐색하여 판단합니다.
이떄 8방향 Cost를 계산해서 최적 경로를 찾는 알고리즘입니다.
트리구조
- 그래프 일종, 여러 노드가 한 노드를 가리킬 수 없는 구조
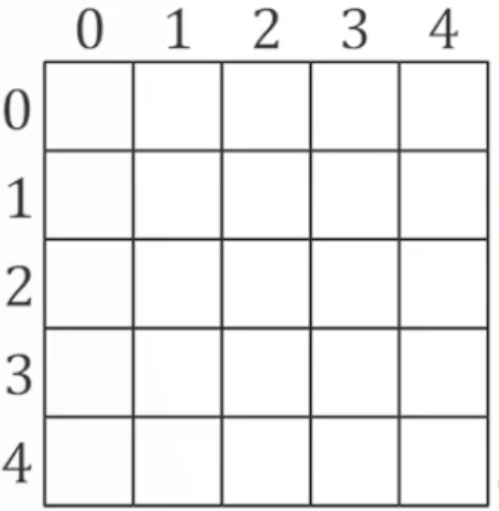
- 5x5 방을 100개 단위로 100x100으로 쪼갠다면 하나의 grid는 5cmx5cm 사이즈를 가지게 됩니다.
- 얼마나 잘게 나누냐에 따라 Resolution이 결정된다.
- 계산량을 고려해 실시간성을 갖춰야합니다.
- 기준점, 사람, 차량, 지형 표현이 가능한 적절한 단위를 선택해야합니다.
- free : space 물체가 없는 영역
- occupied space : 어떤 물체, 장애물이 있는 영역

-탐색 영역 Search
- 탐색 시작
- Open List에 주변 8개 Grid를 삽입
- Open List : 지나갈 수 있는 길을 의미하는 Set
- Closed List : 최적 score를 가지는 Set
- 시작점은 Closed List에 삽입
경로 채점 (Path Scoring)
- F = G + H
- F : Total Score , 현재 이동하는데 걸린 비용과 앞으로 예상 비용을 합친 총 total cost
- G : 시작점으로부터 현재 사각형까지 경로를 따라 이동하는데 소요되는 비용
- H : 현재 사각형에서 목적지 B까지의 예상 이동 비용
- 주변 지형, 지물에 상관하지 않고 예상 이동 비용을 구함
계속 탐색
- Open List에서 가장 작은 F 선택 이후 Closed List에 추가
- 인접 사각형 반복적으로 확인 (가장 작은 Cost Node 가 부모노드가 됨)
- Open List에서 가장 작은 F를 선택하고 Closed List 추가 반복하며 계속적으로 Closed List를 조사하며 점차 확산
경로 선택
- Open List가 비어있는 경우 -> 실패
- 목표 사각형이 Open List에 들어가는 경우 -> 성공
- 도착점이 OpenList에 들어가게되면 Closed List 안에서 부모 노드를 가리키는 방향으로 선을 잇게 됩니다. 즉, 출발점이 나오게되며 거꾸로 길을 잇는 것으로 볼 수 있습니다.
RRT/RRT* algorithm
RRT (Rapidly-exploring Random Tree)
무작위 샘플링을 사용하여 고차원의 구성 공간을 탐색하는 경로 계획 알고리즘
- 샘플링 기반에 의거한 방식
- 시작점, 목적지가 정해지면 임의의 x_rand를 뽑아 검색 트리 T를 계속 확장
- 목적지에 빨리 가고 싶은 경우 x_rand를 균등 분포가 아닌 목적지에 치우치게 하는 분포 형태도 활용이 가능
트리 T가 목적지에 도달 시 목적지부터 시작점까지 재귀적으로 트리를 검색해 경로를 선택합니다.
트리 구조가 퍼져나가는 알고리즘입니다.
랜덤 샘플링이라는 것은 Optimality를 보장하지 않습니다.
RRT_star
RRT의 Optimality를 향상 시킨 알고리즘입니다
새로운 State를 뽑을때마다 new state의 neighbor들은 optimal path로 rewiring 하는 과정이 가장 큰 차이로 볼 수 있습니다.
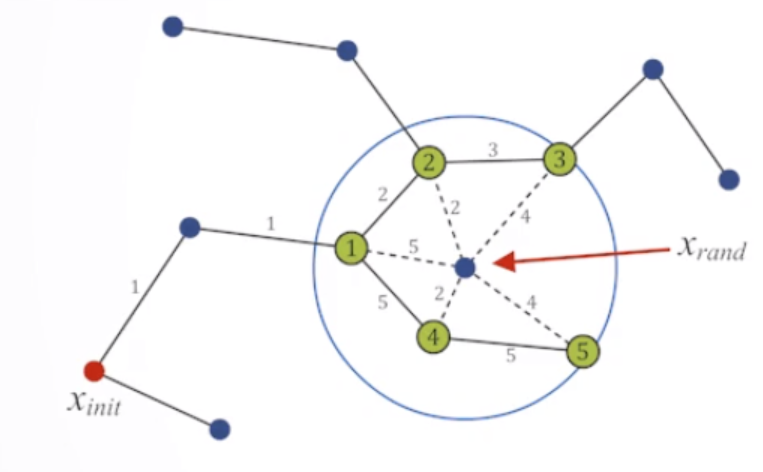
x_rand의 일정 반경에 있는 best parent node를 탐색하므로 optimality가 부여됩니다.
- 새로운 best parent가 선정되면 그 주변 노드들을 또 뒤져서 cost를 기준으로 새로 만든 노드와의 재해석으로 rewiring이 적용됩니다.
- rewiring : 최저 cost로 가는 경로가 맞는지를 체크해 edge를 끊거나 새로운 edge를 만들어내는 과정
주변 obstacle 정보를 고려해 반복적으로 트리 구조를 확장 & Real Time 보장해야합니다.
- 실시간성을 위해 적정량의 트리 구조를 만들어야합니다.
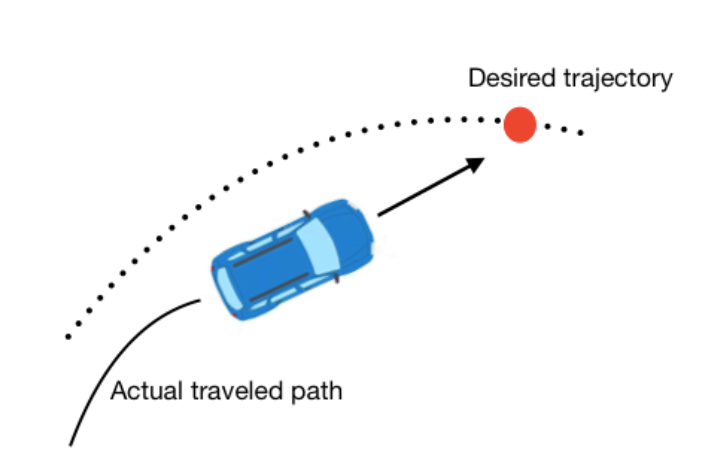
3. 경로 추종
경로 생성 과정으로 선택된 실시간 경로를 차량이 정확하게 따라갈 수 있도록 주행하는 기술입니다.
제어 기술과 연관성이 매우 높습니다.
- Steering angle과 Velocity 신호를 최적으로 생성해내는 것이 중요 포인트입니다.
Pure Pursuit Control
하나의 점을 생성해 경로를 추종
-> 목표 경로를 실시간으로 추종하는 알고리즘을 사용합니다.
-> 하나의 목표지점을 골라 Steering angle을 발행
원에 홀을 만들고 그 전체 원의 r을 가지고 지속적으로 추종할 수 있는 steering angle을 만듭니다.
추종해야되는 path의 일부분의 한 점을 끊임없이 한포인트를 계속 선택하며 맞는 원호를 그리고 그 원의 r을 가져다가 결과적으로 곡률을 구해 끊임없이 조향각을 발생합니다.
- 즉, 차량 앞의 path 위 한 점을 원호를 그리며 따라가는 방법입니다.
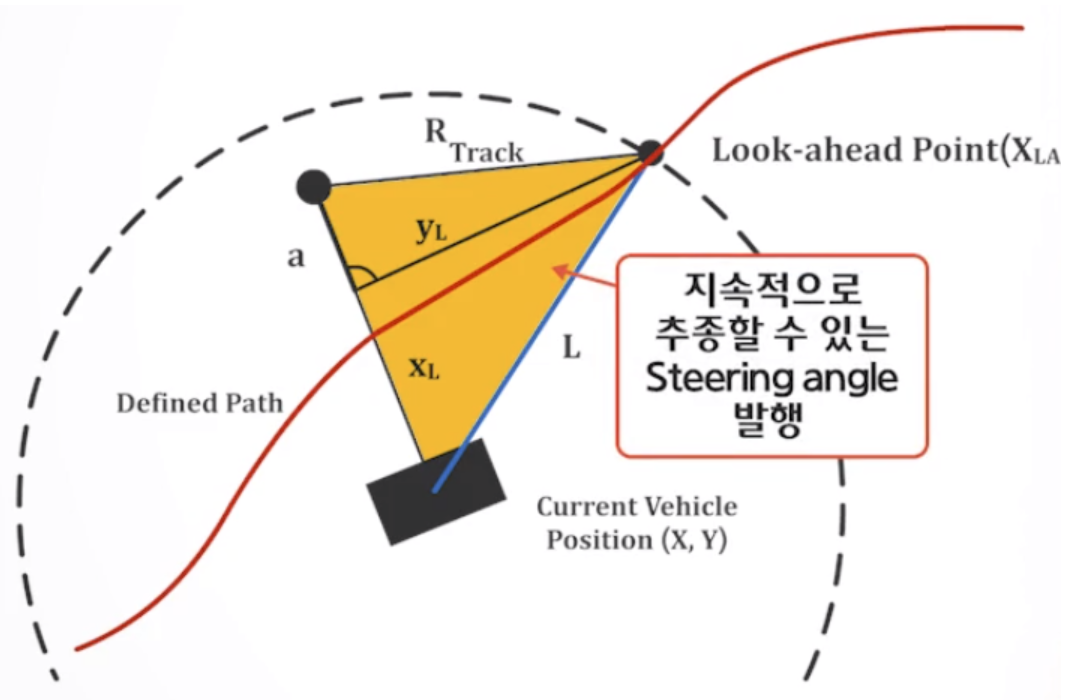
Lookahead distance
- 실시간 기준 Distance 측정
- 추종해야할 점을 지속적으로 생성합니다 -> 어떤 점을 고를 것인지 기준을 제시하는 것이 Lookahead distance (저속 : 가까운 점, 고속 : 먼 점)
- Lookahead distance 기준으로 하나의 점을 정함
- 차와 점을 잇는 원을 그림
- r(반지름)을 구함
- 곡률 계산
- Steering angle 계산
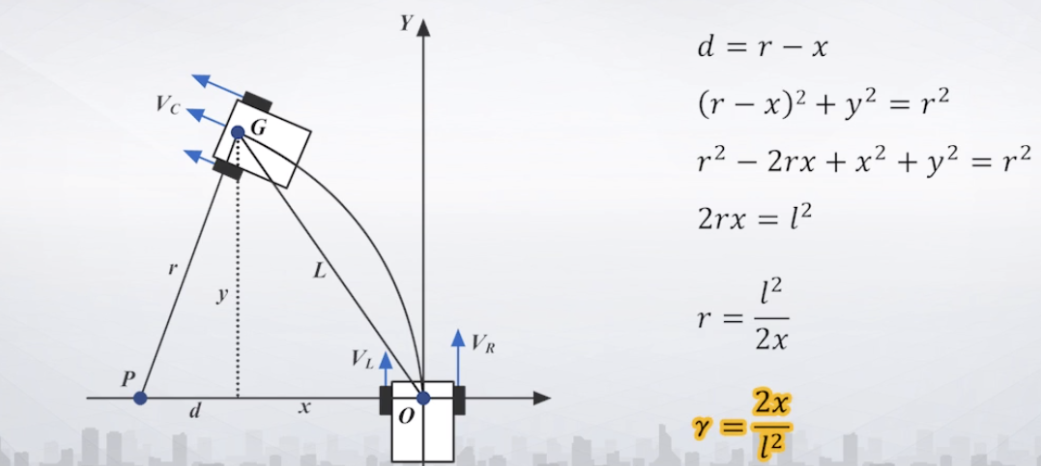
- r을 구할 수 있다면 곡률을 구할 수 있습니다.
- 곡률은 steering angle과 비례 관계입니다. (차체폭, 길이 등으로 계산 가능)
- 고속도로에서는 Lookahead distance를 멀리, 곡선이 심한 코너에서는 매우 짧게 잡아야합니다.
- 멀리잡으면 곡률이 매우 커서 Steering이 거의 0에 수렴
- 짧게 잡으면 곡률이 작으므로 Steering이 매우 큼 (곡선 주행)
- 즉시 포인트를 잡아야 하므로 이후 상황 예측 불가
- Way Point의 Set을 미리 검사하도록 보완해야합니다. (미래 예측 포인트, 도로 곡률 고려)
- 미리 Lookahead distance를 조절해주는 아이디어가 추가되어야합니다.
Model Predictive Control
실시간성이 높은 예측 컨셉
목표 경로를 최적으로 추종하여 쫓아가는 알고리즘
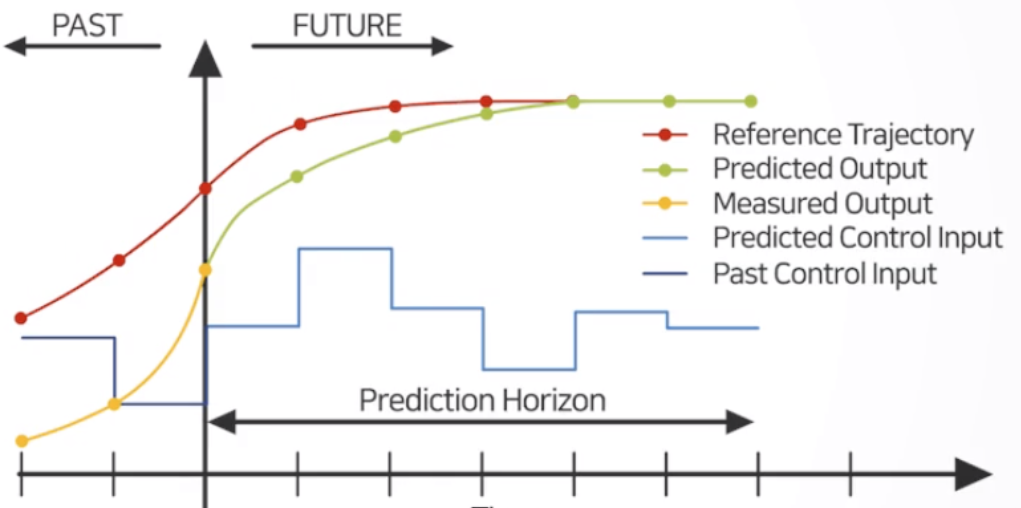
- Control input 이나 Measurement output도 예측되는 영역까지 있기 때문에 단순히 끊임없이 실시간으로 현재까지 정보만을 이용하는 제어 방법보다는 예측이 되므로 좀 더 안정성이 높은 알고리즘을 만들 수 있음
- Pure Pursuit은 기하학적 접근 방법, 당양한 동력학적 변수가 제외됨, 미래 예측이 어려움
- Model Predictive Control은 모델 예측 접근 방법이고, 실시간 예측 및 추종, 광범위한 범위에서 주목받는 연구분야
- PID 방법 -> Feedback loop 의 기본적 방법
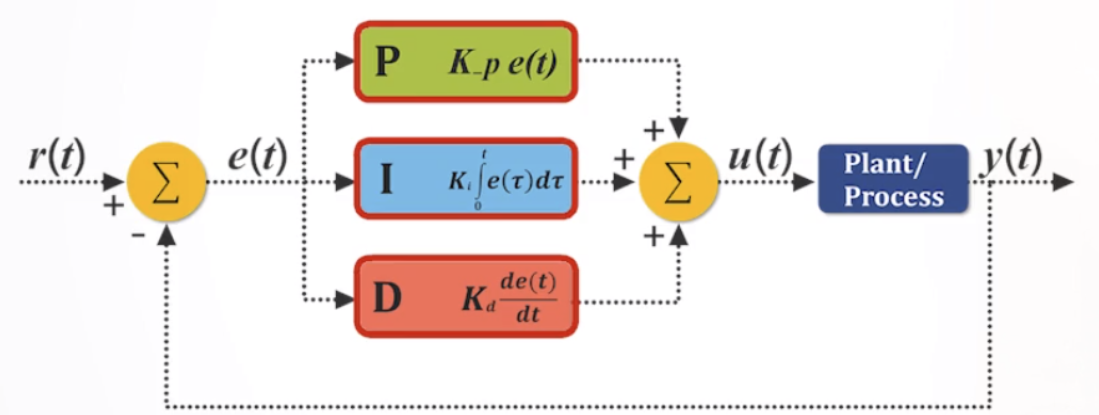
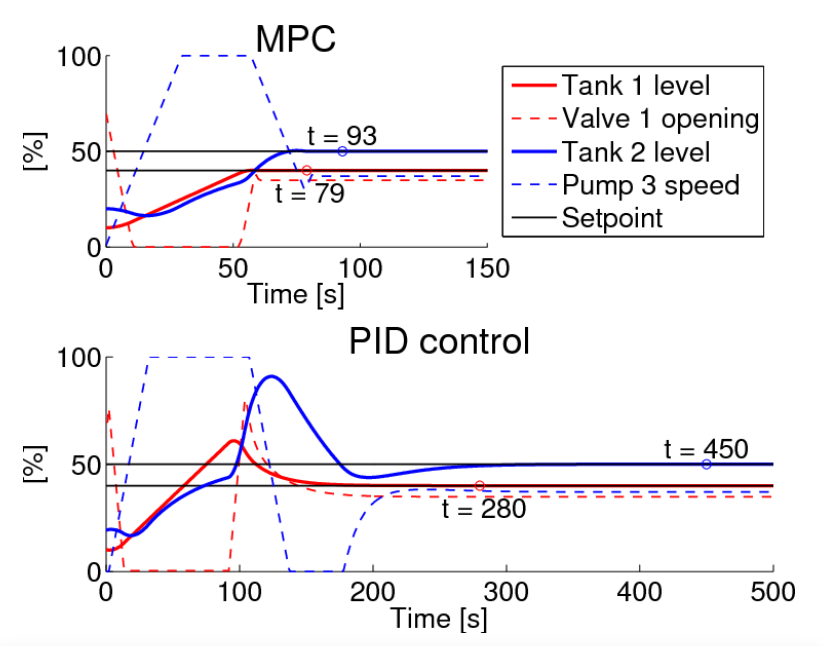
MPC vs PID
PID : feedback loop은 Gain Parameter를 잘못 설정하면 oscillation 발생
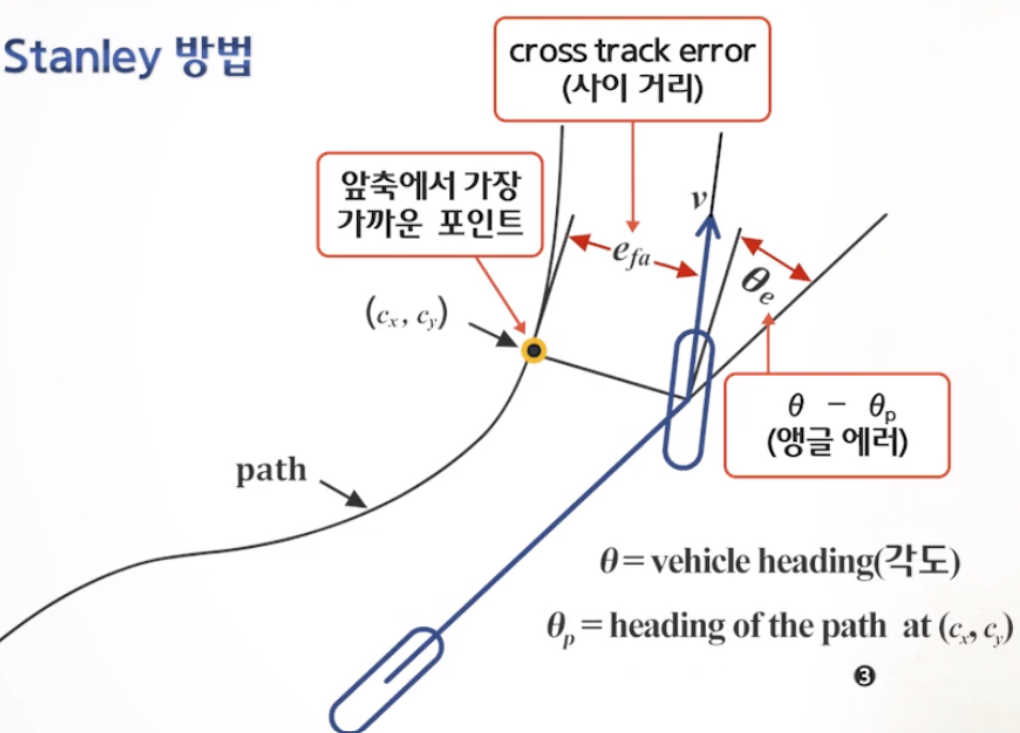
MPC : 현상을 모델링되어 있으며, cross-track error로 얼마나 어긋나 있는지를 확인하며 보낼 수 있습니다.
Cost Function : cost를 Minimize 할 수 있도록 조향각/속도를 결정
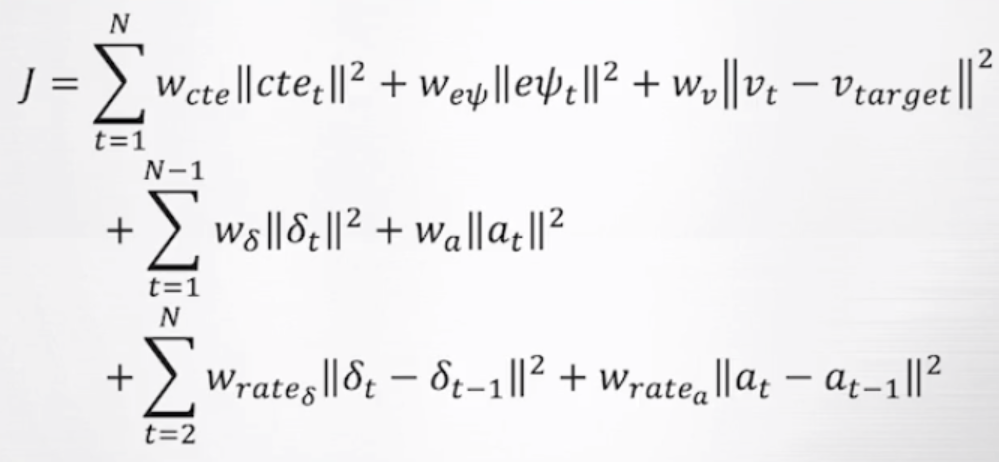
차량 제어를 위한 Cost 설정 및 cost term들은 제각각 의미 보유합니다.
- 자율주행에 필요한 Cost를 제시해줍니다.
- 매우 짧은 시간에 대한 예측은 가능합니다
- dt와 샘플 개수를 설정합니다. 이는 안정적인 주행경로를 제시할 수 있게 합니다.
- t 영역 정보로 t+1을 예측해 보다 안정적 주행 기술을 달성하고자합니다.
MPC vs Pure Pursuit
-> 기하학적인 접근과 모델적 접근으로 동기가 아예 다릅니다.
-> 두 제어 알고리즘 모두 간단한 경우의 경로 추종은 무리없이 가능합니다.