우선적으로 Capstone에서 사용할려하는 Lidar인 RPLidar A1를 이용할 거기 때문에 잘 작동되는지 테스트를 해봐야한다.
결론적으로만 말하면 제목을 보시다시피 일단 실패를 하긴했다... 과정에 대해서 적어보는 시간을 가져보자

나름 성능 괜찮고, 가성비가 나쁘지 않기 때문에 구매를 하였다.
기본적으로 작동이 되는지 먼저 테스트를 해보기 위해 여러가지 방법을 시도하였다.
1) Robostudio 확인
우선 local에 연결 후 (mini USB to USB 선이 필요하다) 확인을 해보았다.
현재 해당 라이더는 UART 신호를 USB 신호로 변환하는 어댑터를 가지고 있다. 해당 어댑터를 USB 신호로 변환후 local에서 잘 수신되는지 확인하기 위해서 SLMATEC 회사에서 추천하는 Robostudio로 확인을 한다.

해당 프로그램을 다운받는 방법은 slametec 공식 홈페이지에서 SDK 다운로드 및 드라이버 설치 및 프로그램 다운까지 A to Z로 알려주니깐 그대로 따라하면 되고, 다음과 같은 실행화면이 나온다면 왼쪽 상단에 Lidars라고 보이는 곳을 클릭하면 된다.

현재 처럼 마우스 오른쪽 버튼을 누르면 Manual connect to Lidar .. 이 보이는데 해당 부분을 클릭하고 연결되어있는 포트 번호를 클릭하면 된다
-> 제어판의 장치관리자를 들어가서 포트를 확인해보면 Lidar 포트가 몇번인지 육안으로 확인할 수 있다.


==> Robostudio로 확인하니 연결이 안됐다고만 뜬다고 한다
공식 홈페이지에서 알려주는 방식대로 했더니만 오류가 뜬다고 하니 이상할 따름이다
혹시나 Robostudio 설치과정에서 문제가 있을 수 있으니 다른 방법으로 시도해보자
2) frame_grabber.exe
위에 나온 frame_grabber.exe를 이용하여서 연결된 포트에 센서가 잘 인식되는지 확인을 해보는 것이다.

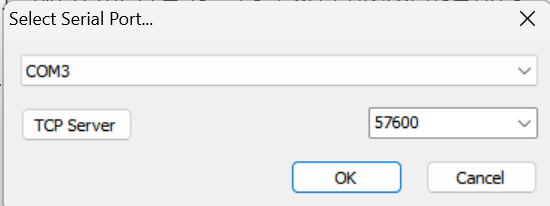
다음과 같이 Serial port를 똑같이 설정해주고 baudrate 또한 설정을 해준다.
우리는 datasheet를 보면 알듯이 baudrate는 A1/A2 시리즈는 115200을 잡고 A3 시리즈는 256000을 잡고 하면 된다.

역시 기대도 안했지만 그대로 bind가 해당 포트에서 안됐다고만 할 뿐이다.
이쯤이면 하드웨어의 문제 (Lidar 자체 , 어댑터 오류 , USB 포트 오류) 3개중에 하나로 생각된다.
-> github에서 나온 issue들에선 Lidar를 때리면 가끔 잘 나온다고도 하는데... 그 부분에서는 시도했는데 역시나 잘 안된다 (약하게 때려서 그런가...)
결론 : LiDAR 부분에서 문제가 있는것으로 확인된다. 추후 하드웨어는 교체가 필요하지만 최종 작품에서는 ROS를 이용하여서 프로그램 로직을 굴려야하니 다음은 ROS를 설치해보고 이를 통해서도 다시 확인을 해보자
'Capstone Design(캡스톤)' 카테고리의 다른 글
| [LiDAR] Ubuntu 18.04 + ROS 설치 (0) | 2024.01.22 |
|---|
